一、单项选择题(本题共<strong><span>8</span></strong><strong><span>小题.在每小题给出的四个选项中,只有一个选项正确,每小题</span></strong><strong><span>4</span></strong><strong><span>分,共</span></strong><strong><span>32</span></strong><strong><span>分)</span></strong>
-
1.
小明在考试之前对习题中的一些易错的概念进行了整理和归纳,下列说法中正确的是( )
A . 做圆周运动的物体所受合力一定指向圆心
B . 匀速圆周运动一定是变速运动
C . 牛顿提出万有引力定律时,便测出了万有引力常量
D . 开普勒第三定律仅适用于行星绕太阳的运动,不适用于卫星绕地球的运动
-
2.
下列有关生活中的圆周运动实例分析,其中说法正确的是( )

A . 如图A所示,汽车通过凹形桥的最低点时,汽车处于失重状态
B . 如图B所示,火车转弯超过规定速度行驶时,外轨对轮缘会有挤压作用
C . 如图C所示,轻质细绳长为l,一端固定一个小球,绕另一端O点在竖直面内做圆周运动,在最高点小球的速度可以小于 D . 如图D所示,脱水桶的脱水原理是水滴受到的离心力大于它受到的向心力,从而沿切线方向甩出
D . 如图D所示,脱水桶的脱水原理是水滴受到的离心力大于它受到的向心力,从而沿切线方向甩出
-
3.
如图所示为自行车的传动装置示意图,已知链轮的半径

cm,飞轮的半径

cm,后轮的半径

cm,A、B(图中未画出)分别为链轮和后轮边缘上的点.若飞轮转动的角速度为20rad/s,则在自行车匀速前进的过程中下列说法正确的是( )

A . 链轮和后轮的角速度大小之比为2∶1
B . A、B两点的线速度大小之比为1∶2
C . A、B两点的向心加速度大小之比为1∶12
D . 自行车前进的速度大小约为1m/s
-
-
5.
“双星系统”由两颗相距较近的恒星组成,每个恒星的线度远小于两个星体之间的距离,而且双星系统一般远离其他天体。如图所示,两颗星球组成的双星,在相互之间的万有引力作用下,绕连线上的O点做周期相同的匀速圆周运动。现测得两颗星之间的距离为L,质量之比为m
1:m
2=3:2。则可知( )

A . m1、m2做圆周运动的线速度之比为3:2
B . m1、m2做圆周运动的角速度之比为2:3
C . m1做圆周运动的半径为 L
D . 其他条件不变, 只两颗星之间的距离增大时两颗星的周期变小
L
D . 其他条件不变, 只两颗星之间的距离增大时两颗星的周期变小
-
-
-
8.
如图所示,倾角

的斜面ABC固定在可以绕竖直轴转动的水平转台上,斜面最低点A在转轴

上。转台以角速度ω匀速转动时,将质量为m的小物块(可视为质点)放置于斜面上,经过一段时间后小物块与斜面一起转动且相对静止在斜面上,此时小物块到A点的距离为L。已知小物块与斜面之间动摩擦因数为0.5,重力加速度为g,若最大静摩擦等于滑动摩擦力,

,

。则物块相对斜面静止时( )

A . 小物块受到的摩擦力方向一定沿斜面向下
B . 小物块对斜面的压力一定等于mg
C . 水平转台转动角速度ω应不小于 D . 水平转台转动角速度ω的最大值为
D . 水平转台转动角速度ω的最大值为
二、多项选择题(本题共<strong><span>3</span></strong><strong><span>小题.每小题只有两个正确选项,选对不全得</span></strong><strong><span>2</span></strong><strong><span>分,全部选对得</span></strong><strong><span>4</span></strong><strong><span>分,不选或错选不得分,共</span></strong><strong><span>12</span></strong><strong><span>分)</span></strong>
-
9.
(2023高一下·深圳期中)
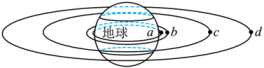
如图所示,a为地球赤道上的物体,随地球表面一起转动,b为近地轨道卫星,c为同步轨道卫星,d为高空探测卫星。若a、b、c、d绕地球转动的方向相同,且均可视为匀速圆周运动。则( )
A . a、b、c、d中,a的加速度最大
B . a、b、c、d中,b的线速度最大
C . a、b、c、d中,c的角速度最大
D . a、b、c、d中,d的周期最大
-
10.
某水平圆形环岛路面如图(a)所示,当汽车匀速率通过环形路段时,汽车所受侧向静摩擦力达到最大时的最大速度称为临界速度,认为汽车所受最大静摩擦力等于滑动摩擦力,下列说法正确的是( )

A . 汽车所受的合力为零
B . 汽车受重力、弹力、摩擦力的作用
C . 如图(b)甲车的临界速度小于乙车的临界速度
D . 如图(b),若两车质量相同,以大小相等且不变的角速度绕环岛中心转,甲车所受侧向静摩擦力比乙车的大
-
三、实验题(本题共<strong><span>2</span></strong><strong><span>个小题,满分</span></strong><strong><span>14</span></strong><strong><span>分)</span></strong>
-
12.
探究向心力的大小F与质量m、角速度

和半径r之间的关系的实验装置如图所示。转动手柄,可使塔轮、长槽和短槽随之匀速转动。塔轮自上而下有三层,左侧塔轮自上而下半径分别为r、2r、3r,右侧塔轮自上而下半径分别为3r、2r、r。左右塔轮通过皮带连接,并可通过改变皮带所处的层来改变左右塔轮的角速度之比。实验时,将两个小球分别放在短槽C处和长槽的A(或B)处,A、C到塔轮中心的距离相等。两个小球随塔轮做匀速圆周运动,向心力大小可由塔轮中心标尺露出的等分格的格数读出。

-
(1)
在该实验中应用了____来探究向心力的大小与质量m、角速度
和半径r之间的关系。
A . 理想实验法
B . 控制变量法
C . 等效替代法
-
(2)
如果某次实验中,小明用两个质量相等的小球放在A、C位置,匀速转动时,左边标尺露出1格,右边标尺露出9格,则皮带连接的左右塔轮转动的角速度之比为;塔轮自上而下为第一层至第三层,此时左侧塔轮第层与右侧塔轮第层通过皮带连接。
-
13.
某兴趣小组的同学设计了图(a)所示的装置,用来测量滑块质量(滑块可视为质点)和滑块与水平台面间的动摩擦因数。水平转台能绕竖直的轴匀速转动,装有遮光条的小滑块放置在转台上,不可伸长的细线一端连接小滑块,另一端连到固定在转轴上的力传感器上,连接到计算机上的传感器能显示细线的拉力F,安装在铁架台上的光电门可以读出遮光条通过光电门的挡光时间t,兴趣小组采取了下列步骤:

①用游标卡尺测量遮光条的宽度d;
②将滑块放置在转台上,使细线刚好绷直,量出滑块到转轴的距离L;
③控制转台以某一角速度匀速转动,记录力传感器和光电门的示数,分别为 和
和 ;依次增大转台的角速度,并保证其每次都做匀速转动,记录对应的力传感器示数
;依次增大转台的角速度,并保证其每次都做匀速转动,记录对应的力传感器示数 、
、 …和光电门的示数
…和光电门的示数 、
、 …。
…。
回答下面的问题:
-
(1)
滑块匀速转动的线速度可表示为

(用d、t中字母表示)。
-
(2)
如图(b),当

大于b时,滑块做匀速圆周运动的向心力由哪些力提供( )
A . 绳子的拉力
B . 转盘的摩擦力
C . 绳子的拉力和转盘的摩擦力
-
(3)
处理数据时,兴趣小组的同学以力传感器的示数F为纵轴,
为横轴,建立直角坐标系,描点后拟合为一条直线,如图(b)所示(图中a、b已知),设最大静摩擦力等于滑动摩擦力,重力加速度为g,则物块的质量

。(用a、b、L、d中字母表示)
四、计算题(本题共<strong><span>3</span></strong><strong><span>个小题,共</span></strong><strong><span>42</span></strong><strong><span>分.解答应写出必要的文字说明、方程式和重要演算步骤,只写出最后答案的不能得分,有数值运算的题,答案中必须明确写出数值和单位.)</span></strong>
-
14.
“嫦娥五号”探测器已成功实施近月制动,进入环月轨道.探测器在近月点多次变轨后依次进入椭圆轨道Ⅰ和近月圆轨道Ⅱ,简化过程如图。已知探测器在轨道Ⅱ上绕月运行的周期为

, 轨道Ⅰ近月点和远月点到月心距离分别为a和b,引力常量为G。求:

-
-
-
15.
如图所示,一圆盘可以绕过圆心

的竖直轴转动,圆盘圆心
处有一光滑小孔,质量为

的物体

放于距圆心

处,通过一轻质刚性绳与圆心下方物体

相连,
的质量为

,
与圆盘之间的最大静摩擦力等于滑动摩擦力。圆盘由静止开始缓慢加速转动,物体
与圆盘始终保持相对静止。

-
(1)
细绳伸直且无拉力的最大角速度为

, 问
与圆盘之间的动摩擦因数;
-
(2)
当圆盘角速度多大时,
将离开地面。
-
16.
某工厂生产流水线示意图如图所示,半径较大的水平圆盘上某处E点固定一小桶,在圆盘直径DE正上方平行放置长为L=6m的水平传送带,传送带轮的半径都是 r=0.1m,传送带右端C点与圆盘圆心O在同一竖直线上,竖直高度h=1.25 m.AB为一个与CO在同一竖直平面内的四分之一光滑圆轨道,半径R=1.25 m,且与水平传送带相切于B点.一质量m=0.2 kg的工件(可视为质点)从A点由静止释放,工件到达圆弧轨道B点无碰撞地进入水平传送带,工件与传送带间的动摩擦因数μ=0.2,当工件到达B点时,圆盘从图示位置以一定的转速n绕通过圆心O的竖直轴匀速转动,工件到达C点时水平抛出,刚好落入圆盘上的小桶内.取

, 求:

-
-
(2)
若传送带不转动时圆盘转动的转速n应满足的条件;
-
(3)
当传送带轮以不同角速度顺时针匀速转动时,工件都从传送带的C端水平抛出,落到水平圆盘上,设落点到圆盘圆心O的距离为x,通过计算求出x与角速度ω之间的关系并准确作出x—ω图像.














